MAJOR QUESTION:
What are the optimal Biomechanics of an overarm volleyball serve?
THE ANSWER:
The volleyball overarm serve is one of the most important skills in the game, as it sets up each point and encourages many different movement problems. In this blog we will be exploring the optimal biomechanics of the volleyball overarm serve and how each component of this skill influences the overall outcome. The video located below, explains all of the stages involved in the overarm serve in volleyball and gives an accurate description of the correct skills and technique required to successfully complete this action. We will go into further detail and discussion in each of these stages, and link it to the concepts and influences that biomechanics has on each stage of the serving process.
STEP-IN
Before serving, the weight of the player's body should be on the back foot of the preferred side before stepping forward with the opposite foot. This transfers the weight from the back foot to the front, to bring the force forward and therefore create momentum, as shown in Figure 1. Blazevich (2012) states that when we strike the ground during the ground-contact phase, the earth provides a reaction force allowing force production in a particular movement.
Figure 1. The stepping-in stage before making hand-contact with the ball.

Figure 1. The stepping-in stage before making hand-contact with the ball.

BALL TOSS
During the ball toss, the volleyball player should consider the angle that the ball is positioned in front of their body. The optimal angle of release is 90° directly in front of the body, as shown in figure 1 at the first stage. It is critical that the player maintains a straight arm (with the player's non dominant hand) throughout the toss, especially when it is being projected into the air. As you perform the ball toss, the angle of the arm will reduce slightly along with a slight knee-bend to create force. According to Blazevich (2012) a stationary object has no momentum, because it has no velocity, but it still has inertia (you still have to apply a force to change its state of motion). Blazevich (2012) states that when changing an object's momentum, we need to apply a force. In this case the player creates a slight downward motion with the non-dominant hand (holding the ball out in front) to then create a greater angle of release to force and propel the ball vertically upwards.
OVERARM ACTION
The ready-stage (see figure 2) within the volleyball serve, is the starting point for the overarm action. The player draws their arm back like an arrow, with their hand next to their ear. The arm moves forward through an angle, and therefore has angular momentum when approaching the ball. According to Blazevich (2012), angular momentum is a function of mass and velocity, except in this case the velocity is angular (the arm), and the mass is at a distance, therefore having a moment of inertia.
To produce topspin on a serve for a tactical technique, and to increase velocity and rotation, the player will increase his/her arm-speed before making contact with the ball (Miller, B, 2005).
Once the volleyball is projected into the air, the arm which made contact with the ball can either follow through the front of the body, or stop immediately after the contact in mid-air (refer to figure 3).
Figure 2. The 'ready-position' before the overarm action.

Figure 3. The follow through serving arm after the ball-contact has been made.

To produce topspin on a serve for a tactical technique, and to increase velocity and rotation, the player will increase his/her arm-speed before making contact with the ball (Miller, B, 2005).
Once the volleyball is projected into the air, the arm which made contact with the ball can either follow through the front of the body, or stop immediately after the contact in mid-air (refer to figure 3).
Figure 2. The 'ready-position' before the overarm action.

Figure 3. The follow through serving arm after the ball-contact has been made.

HAND-BALL CONTACT
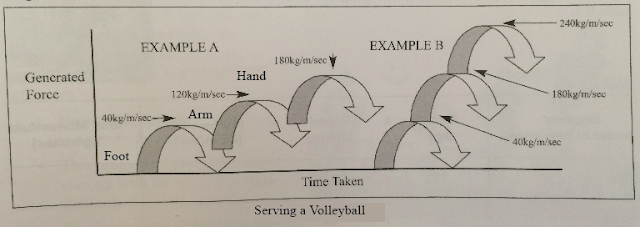
The impact of the hand-contact and the speed of the arm swing direct the ball (Miller, B, 2005). Hand ball contact is one of the most critical stages in the overarm serve. The way the player contacts the ball will determine whether it is a good serve or a not so effective one. It is preferable that the player contacts the ball on the bottom half of their palm. Hand contact is at the end of the sequence in the kinetic chain, and the other stages of the kinetic chain will affect this stage. According to Blazevich (2012), the throw-like movement is when all the joints of the kinetic chain extend sequentially one after the other. In the volleyball serve, we use the throw-like movement to project the ball over the net, as it becomes one large movement. In reference to Wilson, Hodgson & McNaughton (2011), it is important that there is no break in the transfer from one movement to the other, as each new movement should begin at the moment the last one has reached its maximum force. In figure 4, it shows the sequence of movements in the kinetic chain following one after the other, and explains that when one movement is at its optimal peak, the next movement begins. Overall this will achieve a greater level of force in the skill.
Figure 4.
 (Wilson, Hodgson & McNaughton, 2011)
(Wilson, Hodgson & McNaughton, 2011)
Figure 4.

When the hand contacts the ball it creates a collision, this collision has a high amount of energy that will be converted between the ball and the hand. As this collision happens, a proportion of the total energy will remain in each object after collisions; this is known as the Coefficient of Restitution. As the ball contacts the hand, the ball will slightly deform before regaining its original shape after it leaves the hand.
In reference to Newton's first law: Inertia, the ball will remain at rest unless a force is applied against it. In the overarm serve the hand makes contact with the mass (that being the ball) and transfers the energy and applies a force through the hand contact, so that the ball is no longer at rest.
In order to accelerate the ball we need to consider torque (moment of force). Torque is the magnitude of the force causing the rotation of an object (Blazevich, 2012). In the serve, to create acceleration of the volleyball over the net, the main pivot point (the shoulder) creates the angular motion, which projects a force through the arm. Therefore, the torque is applying a force at a distance from the pivot point. This angular momentum creates energy which is expelled through the hand forcing the ball to reach a greater distance, as torque equals force x distance (Blazevich, 2012). The more force a player applies during hand ball contact, the greater the distance the ball will travel. This represents Newton's second Law stating that the acceleration of an object is proportional to the net force acting on it and inversely proportional to the mass of the object. When a volleyball is served, it goes from a resting state and begins to move. The force (the hand) causing the movement, has now generated acceleration (Wilson, Hodgson & McNaughton, 2011).
In order to accelerate the ball we need to consider torque (moment of force). Torque is the magnitude of the force causing the rotation of an object (Blazevich, 2012). In the serve, to create acceleration of the volleyball over the net, the main pivot point (the shoulder) creates the angular motion, which projects a force through the arm. Therefore, the torque is applying a force at a distance from the pivot point. This angular momentum creates energy which is expelled through the hand forcing the ball to reach a greater distance, as torque equals force x distance (Blazevich, 2012). The more force a player applies during hand ball contact, the greater the distance the ball will travel. This represents Newton's second Law stating that the acceleration of an object is proportional to the net force acting on it and inversely proportional to the mass of the object. When a volleyball is served, it goes from a resting state and begins to move. The force (the hand) causing the movement, has now generated acceleration (Wilson, Hodgson & McNaughton, 2011).
Projectile motion
Any object that moves through the air after being released can be considered a projectile (Wilson, Hodgson & McNaughton, 2011). In volleyball, a player needs to consider the projectile motion when serving a ball. Additionally, projectile motion (Blazevich, 2012) refers to the motion of an object projected at an angle into the air. Gravity and air resistance affect such objects, and in this case will affect the volleyball's state of motion while travelling over the net during the serving process.
Blazevich (2012) acknowledges that if the projectile moves only vertically (for example, a ball thrown straight upwards), its projection speed will determine the height it reaches before gravity accelerates it back towards the Earth. In the toss stage of the volleyball overarm serve, the ball is projected vertically into the air. This suggests that the toss must be as accurate as possible in order to determine the height of the toss before gravity accelerates it back towards the ground. Additionally, in regards to the angle of projection, if the toss is projected straight into the air, the ball will land back at its starting point, and therefore its range is zero. The larger the angle of projection, the larger the range of projection will be.
Overall, it is important that the angle that the ball is tossed/projected into the air at the beginning stage of a serve is accurately vertical, so that the ball doesn't go too far in front of the body, making it difficult for the player to change their stance and adjust to the situation. This may cause the serve to be less successful as the toss sets up the rest of the serving process.
Any object that moves through the air after being released can be considered a projectile (Wilson, Hodgson & McNaughton, 2011). In volleyball, a player needs to consider the projectile motion when serving a ball. Additionally, projectile motion (Blazevich, 2012) refers to the motion of an object projected at an angle into the air. Gravity and air resistance affect such objects, and in this case will affect the volleyball's state of motion while travelling over the net during the serving process.
Blazevich (2012) acknowledges that if the projectile moves only vertically (for example, a ball thrown straight upwards), its projection speed will determine the height it reaches before gravity accelerates it back towards the Earth. In the toss stage of the volleyball overarm serve, the ball is projected vertically into the air. This suggests that the toss must be as accurate as possible in order to determine the height of the toss before gravity accelerates it back towards the ground. Additionally, in regards to the angle of projection, if the toss is projected straight into the air, the ball will land back at its starting point, and therefore its range is zero. The larger the angle of projection, the larger the range of projection will be.
Overall, it is important that the angle that the ball is tossed/projected into the air at the beginning stage of a serve is accurately vertical, so that the ball doesn't go too far in front of the body, making it difficult for the player to change their stance and adjust to the situation. This may cause the serve to be less successful as the toss sets up the rest of the serving process.
Blazevich (2012) acknowledges that if the projectile moves only vertically (for example, a ball thrown straight upwards), its projection speed will determine the height it reaches before gravity accelerates it back towards the Earth. In the toss stage of the volleyball overarm serve, the ball is projected vertically into the air. This suggests that the toss must be as accurate as possible in order to determine the height of the toss before gravity accelerates it back towards the ground. Additionally, in regards to the angle of projection, if the toss is projected straight into the air, the ball will land back at its starting point, and therefore its range is zero. The larger the angle of projection, the larger the range of projection will be.
Overall, it is important that the angle that the ball is tossed/projected into the air at the beginning stage of a serve is accurately vertical, so that the ball doesn't go too far in front of the body, making it difficult for the player to change their stance and adjust to the situation. This may cause the serve to be less successful as the toss sets up the rest of the serving process.
Angular momentum
In correspondence with Blazevich (2012), any mass moving at any velocity has momentum. In the volleyball serve, our arm rotates and moves through an angle and therefore has angular momentum. Blazevich (2012) says that just like linear momentum, angular momentum is a function of mass and velocity. In volleyball, the arm (which is the velocity), will be angular. The mass of the ball will be at a distance; and therefore this is a function of 'moment of inertia'. Inertia is the propensity for an object to remain in its present state (Blazevich, 2012). During inertia the shoulder is the pivot point during the overarm action. This is the external force that changes the ball's state of motion, which links to Newton's first law, that is, an object will remain at rest or continue to move with constant angular velocity as long as the net forces causing rotation equal zero. All objects with a mass has inertia and the larger the mass, the more difficult it is to change the objects state of motion (Blazevich, 2012).
FOOT POSITIONING
A volleyball player needs to consider the positioning of their feet to achieve the optimal serving technique. Before serving, it is critical to have the correct foot positioning, as it will effect the kinetic chain sequence. According to Miller (2005), placing the leading foot (non-dominant) in the correct position, helps the server square the hips and shoulders towards the intended target, which improves the chances of a successful serve (refer to Figure 6). An object is balanced when the centre of gravity is located above the objects base of support, refer to Figure 5 (Wilson, Hodgson & McNaughton, 2011). Centre of gravity is a variable in the foot positioning stage of an overarm serve. As present in Figure 7, the image on the far right shows a very wide and awkward stance, which will create difficulty for a player when serving, as the hip rotation is decreased and therefore the range of motion is effected. In Figure 7 on the far left, this demonstrates the correct stance as also seen in figure 6. Acknowledging Wilson, Hodgson & McNaughton (2011), this stance is correct because when any limb is moved away from the body, it drags the centre of gravity towards the direction of limb movement. This makes a person less stable unless another limb is moved to counteract the shift in the centre of gravity (Wilson, Hodgson & McNaughton, 2011). In the correct stance the arm is out in front, and by placing the back foot outwards, counteracts this change in movement. This stance/foot position allows the players range of motion to increase as the hip has the ability to twist and is angled at a diagonal, due to the foot positioning of the dominant foot (as seen in Figure 6).
Figure 5. This shows the centre of gravity in different shapes.
 (Wilson, Hodgson & McNaughton, 2011)
(Wilson, Hodgson & McNaughton, 2011)
The foot positioning in the 'ready-stage' before serving, effects the centre of gravity in a significant way, as it can determine a positive or negative result. According to Blazevich (2012), the body is made up of a nearly infinite number of particles, and the point of which all the particles of the body are evenly distributed, therefore the point at which we could draw a single weight vector is the bodies centre of gravity. It is critical to maintain centre of gravity so that the player can stay balanced throughout the serving process, and therefore create a more accurate and successful serve. This can be done by having the correct foot placement behind the base-line while preparing to serve. This correct stance will compliment the rest of the serving sequence, as the feet will effect the movement from the upper-body, e.g. if the player's foot positioning is too far apart, then the body is rotating over a wider centre of gravity and will cause an unbalanced movement process for the upper body.
Foot positioning is also critical in different aspects of the serve. During the beginning stages of the serve, the players transfer their weight from the dominant foot to the non-dominant foot, which is placed closest to the base-line. This also contributes to the player's momentum as the feet move forward, the upper-body follows this movement in a rocking motion (refer to Figure 8).
Figure 5. This shows the centre of gravity in different shapes.

The foot positioning in the 'ready-stage' before serving, effects the centre of gravity in a significant way, as it can determine a positive or negative result. According to Blazevich (2012), the body is made up of a nearly infinite number of particles, and the point of which all the particles of the body are evenly distributed, therefore the point at which we could draw a single weight vector is the bodies centre of gravity. It is critical to maintain centre of gravity so that the player can stay balanced throughout the serving process, and therefore create a more accurate and successful serve. This can be done by having the correct foot placement behind the base-line while preparing to serve. This correct stance will compliment the rest of the serving sequence, as the feet will effect the movement from the upper-body, e.g. if the player's foot positioning is too far apart, then the body is rotating over a wider centre of gravity and will cause an unbalanced movement process for the upper body.
Foot positioning is also critical in different aspects of the serve. During the beginning stages of the serve, the players transfer their weight from the dominant foot to the non-dominant foot, which is placed closest to the base-line. This also contributes to the player's momentum as the feet move forward, the upper-body follows this movement in a rocking motion (refer to Figure 8).
Figure 6. Foot positioning before serving.


Figure 7.
Incorrect stance Correct stance


Figure 8. Transfer of weight while serving
Foot-ground contact
In reference to Newton's third law for every action, there is an equal and opposite reaction, when the foot contacts the ground a vertical (downward) force is applied and therefore stops the foot sinking into the earth (Blazevich, 2012). Newton's third law is applied towards the end of the serve because the ground exerts an equal and opposite reaction which accelerates us forward due to the transfer of weight.
EQUIPMENT VARIABLES
History of how a volleyball is made and the implications it has
When the sport of volleyball was first created in 1895, the bladder from a basketball was used to play but was too slow as it was not heavy enough (Jackson, 2013). Early players attempted to use the whole basketball but they were too heavy. Jackson (2013) also states that following this in 1900, a ball comprising of three layers was created with the first being a latex bladder, second a cheesecloth material around the bladder, and the third was a leather outer layer. This design hasn't changed much since the first design, as it is seen to be very effective for the purpose of this sport.
According to Jackson (2013), for decades the volleyball was stitched with an 18-panel construction. A standard volleyball weighs about 0.60 lb (0.27 kg), has a radius of slightly over 4 inches, and has shallow grooves along its outer shell which effect the way the air moves around the ball (Lithio & Webb, 2006). The first change seen in 100 years since the first volleyball was created, was for the Olympic indoor volleyball competition in 2008 by the company 'Mikasa', when they developed and manufactured a new design. This ball has an 8-panel design to allow more hand contact on the ball for improved accuracy. The ball also contains dimples, which are meant to create an accurate flight pattern. It is clear that a lighter ball allows the ball to float in the air and to be manipulated as a tactical approach, by applying spin on the ball through the design that the ball has. As stated above, the new design by Mikasa, allows more hand contact on the ball, as the seams are not so prominent and frequent, and therefore allows more force and contact to be made to successfully direct the ball. These changes to the volleyball have been altered through advancing technology in sporting equipment and these improvements have enhanced sporting performances by athletes (Wilson, Hodgson & McNaughton, 2011).
Throughout history, the progressions that were used for the game of volleyball can be seen in the list of photos in Figure 9 below.
Figure 9.
Bladder of a Basketball

Basketball

Original Volleyball

Mikasa Volleyball, designed for Olympics in 2008

Optimising a volleyball serve
According to Lithio & Webb (2006), an effective serve in volleyball is crucial to a winning strategy, and that a good serve will either win the point, or will be returned weakly, and therefore giving the serving team the advantage. In Lithio & Webb's paper, they discuss the forces, such as gravity, air resistance and the force from spin that all act on the ball during a serve, and how this effects the serve's potential.
The lighter the object, the more it is affected by air resistance, and volleyballs are considered very light weight (Wilson, Hodgson & McNaughton, 2011). With no horizontal force on the ball, it will move with constant velocity from the time it is served until the time it lands (Lithio & Webb, 2006).
HOW ELSE CAN WE USE THIS INFORMATION:
The information we have attained through researching the biomechanics of the overarm volleyball serve can be applied to other skills within the sport of volleyball. This can include other serving techniques (jump serve) and skills within the game (the spike). Also, some principles can be applied to other ball sports, e.g. tennis and cricket.
Some player's, especially at elite level, prefer to perform a jump serve to tactically put pressure on the opponents. This will still use the principles of biomechanics that were discussed in this blog, however some of the earlier stages (e.g. run-up) will be altered and adapted to the situation.
In the other skills within volleyball, the spike mimics the overarm movement pattern. Players are required to hit the ball over the net using their palm at a closer range, although the ball is already in motion, the biomechanics still apply to this skill.
The principles in biomechanics can be also applied and used in other ball sports. Tennis uses similar movement patterns in the serve, as the ball is tossed in front of the body and the foot positioning needs to be accurate in order to complete the skill successfully. The shoulder also acts as a pivot point in this skill, as it goes through an angular motion in order to produce force to the ball. Although, the hand is not making contact with the ball, the racquet still transfers energy into the tennis ball to accelerate it at an adequate speed. Both sports have a net as an equipment variable, and requires the server to place the ball over the net in this overarm skill.
Some player's, especially at elite level, prefer to perform a jump serve to tactically put pressure on the opponents. This will still use the principles of biomechanics that were discussed in this blog, however some of the earlier stages (e.g. run-up) will be altered and adapted to the situation.
In the other skills within volleyball, the spike mimics the overarm movement pattern. Players are required to hit the ball over the net using their palm at a closer range, although the ball is already in motion, the biomechanics still apply to this skill.
The principles in biomechanics can be also applied and used in other ball sports. Tennis uses similar movement patterns in the serve, as the ball is tossed in front of the body and the foot positioning needs to be accurate in order to complete the skill successfully. The shoulder also acts as a pivot point in this skill, as it goes through an angular motion in order to produce force to the ball. Although, the hand is not making contact with the ball, the racquet still transfers energy into the tennis ball to accelerate it at an adequate speed. Both sports have a net as an equipment variable, and requires the server to place the ball over the net in this overarm skill.
REFERENCES:
Blazevich, A. (2012). Sports biomechanics. London: A. & C. Black.
Hodgson, C., Wilson, A & McNaughton, N. (2011). Physical education. Adelaide, S. Aust.: Greg Eather in association with Adelaide Tuition Centre.
How to Do an Overhand Volleyball Serve. (2012).
How to Do an Overhand Volleyball Serve. (2012).
Jackson, J. (2013). History of Volleyball Balls. Livestrong.com. Retrieved from http://www.livestrong.com/article/352681-history-of-volleyball-balls/
Lithio, D., & Webb, E. (2006). Optimizing a Volleyball Serve (1st ed., pp. 1, 3, 5). Retrieved from https://www.rose-hulman.edu/mathjournal/archives/2006/vol7-n2/paper11/v7n2-11pd.pdf
Miller, B. (2005). The volleyball handbook. Champaign, IL: Human Kinetics.
No comments:
Post a Comment